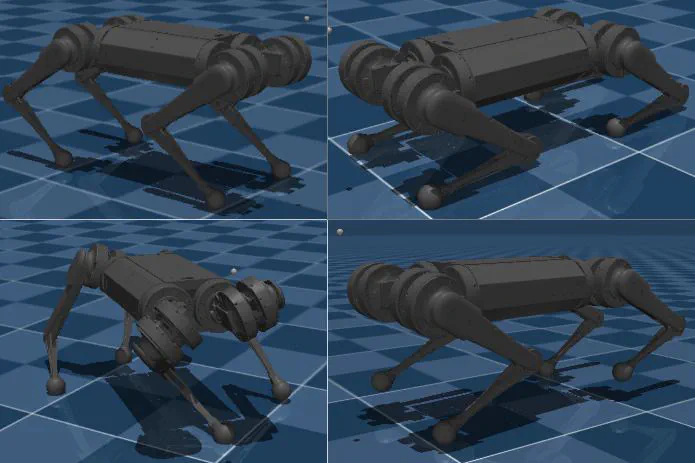
Walking controller for quadruped robot.
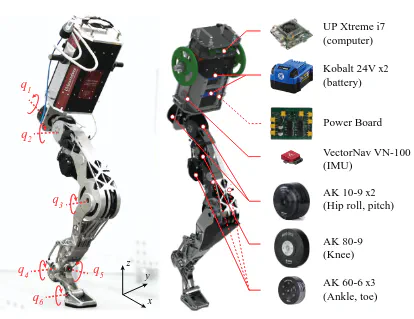
A custom quadruped robot for guiding blind and low-vision individuals.
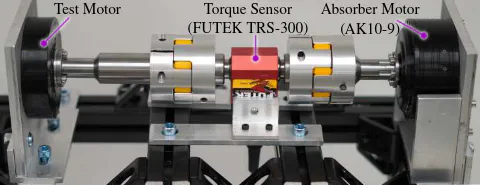
Measures output characteristics of BLDC motors.
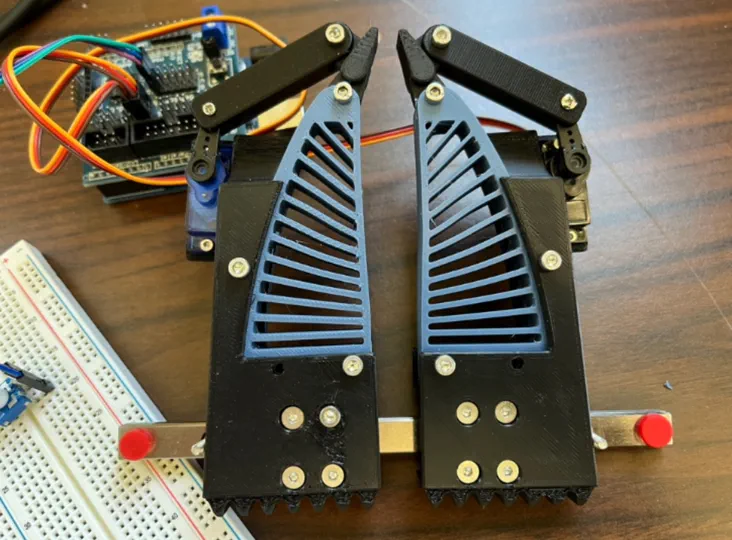
A single legged hopping robot with toe actuation.
Gripper for both power grasps and pinching.