Shape Memory Alloy Actuator Test Bed
Oct 24, 2023
·
1 min read
Skills Used
- Mechanical Design: SolidWorks (CAD, GD&T)
- Sensor Integration: Arduino, Python
- Rapid Prototyping: 3D printing
Project Description
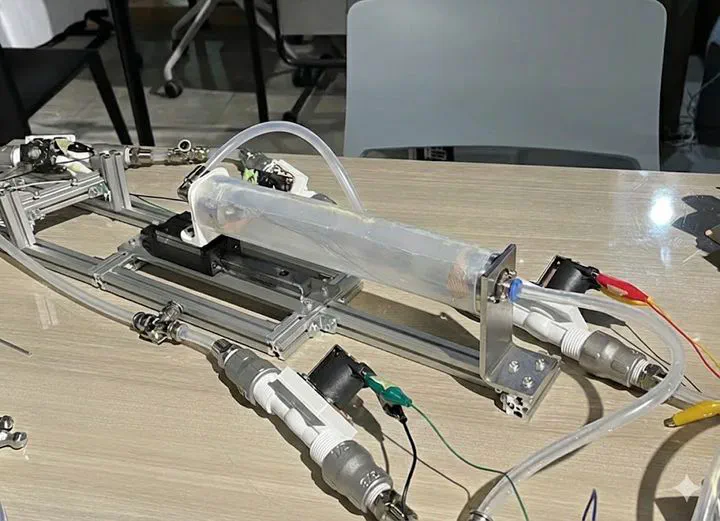
During my summer 2023 research internship at the Robotics Group of OMRON SINIC X Corporation in Tokyo, Japan, I researched methods of speeding up shape memory alloy actuation. After a literature review, I investigated the efficacy of utilizing temperature controlled water to actuate shape memory alloys. I designed the prototype test bed that uses this method of actuation, and created a water switching system using a series of Arduino controlled solenoid valves to control the flow of water. At the end of the internship, I was able to assemble the test bed and create a fully functional Arduino controlled water switching system. However, due to time constraints of the internship program, the test bed was not fully finished.