Soft Gripper with Rigid Finger Tips
Project Contributions
- Design and fabrication of a gripper for handling nursing objects
- Gripper actuation using Arduino
Skills Used
- Mechanical Design: OnShape (CAD), 3D Printing
- Mechatronics: Arduino
Project Description
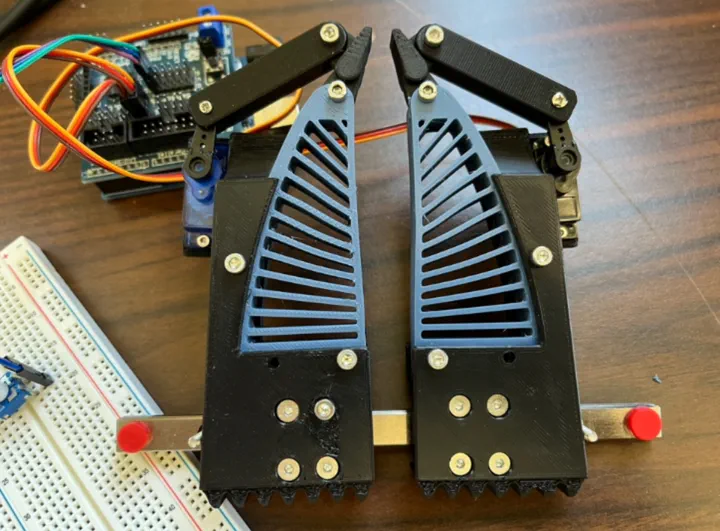
As a part of the Elaine Marieb Center for Nursing Engineering and Innovation and the Mechatronics and Robotics Research Lab at UMass Amherst, I developed a versatile gripper capable of both power grasps and pinching. Inspired by the gripper used in the Universal Manipulation Interface framework, I combined rigid fingers with a fin gripper to enable both pinching and power grasps. This combination enables the gripper to adapt to various nursing applications, allowing for precise pinching of small, thin objects like band-aids, as well as the secure handling of larger items like bottles.
The gripper’s fingers were 3D printed using TPU and PLA, with the rigid fingers powered by SG90 servo motors, making the gripper low-cost. OnShape was used to model the gripper.