MPC Trotting Controller for Quadruped Robot
Dec 9, 2025
·
1 min read
Project Contributions
- Implemented convex MPC controller for a quadruped robot based on MIT Cheetah 3 controller.
Skills Used
- Libraries: NumPy, CasADi
- Simulation: MuJoCo
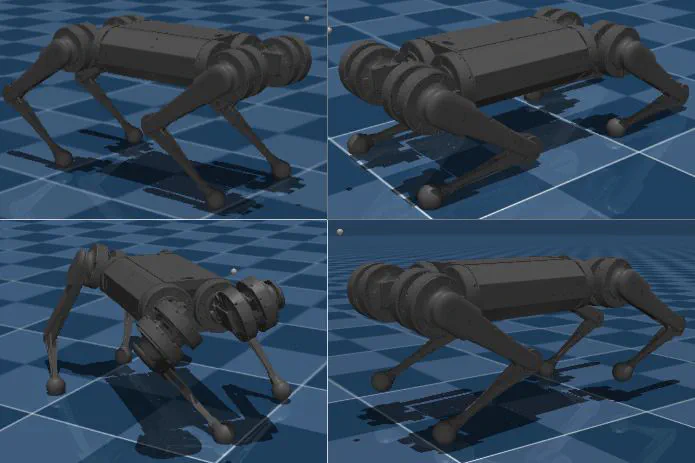
Project Description
As a part of the final project for the MEAM 5170 course at UPenn, I worked on the implementation of a convex MPC trotting controller for a quadruped robot in a group of 2. We were able to have the robot trot forwards at speeds of up to 0.5 m/s in the MuJoCo simulator.