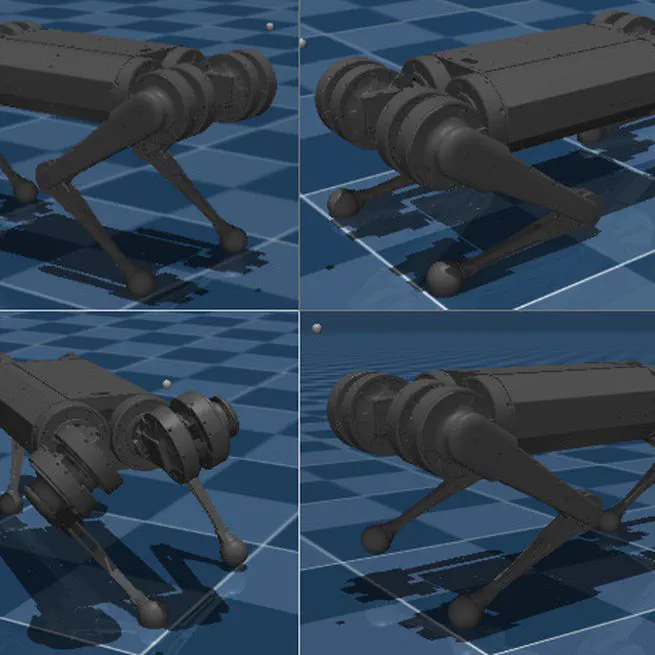
MPC Trotting Controller for Quadruped Robot
Walking controller for quadruped robot.
Dec 9, 2025

Vivo Guide Dog Robot
A custom quadruped robot for guiding blind and low-vision individuals.
May 30, 2025
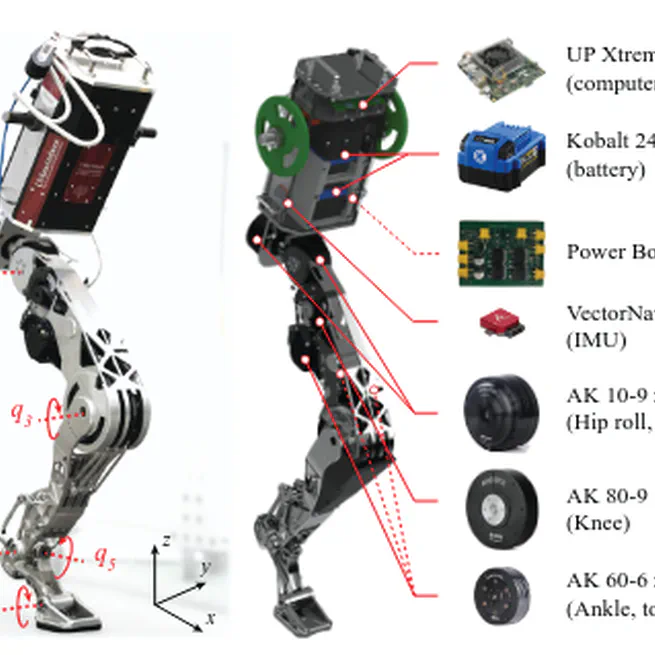
StaccaToe (Single-Legged Hopping Robot)
A single legged hopping robot with toe actuation.
Oct 14, 2024
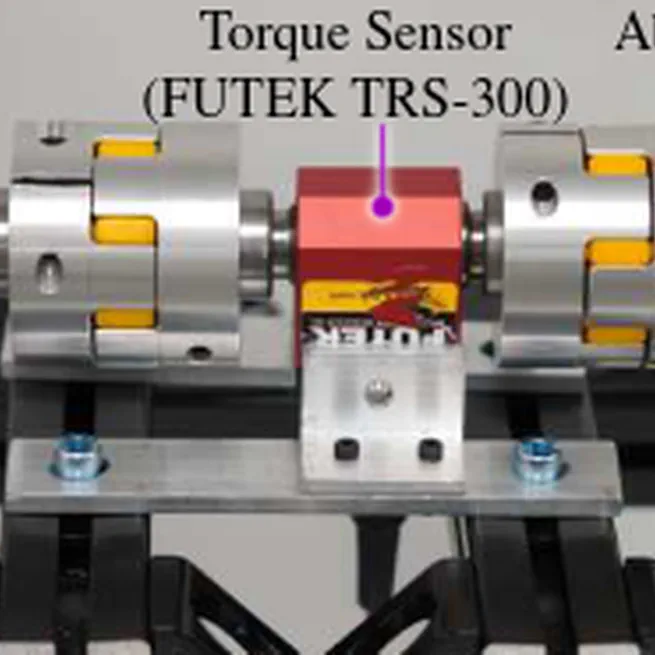
Dynamometer
Measures output characteristics of BLDC motors.
Oct 14, 2024
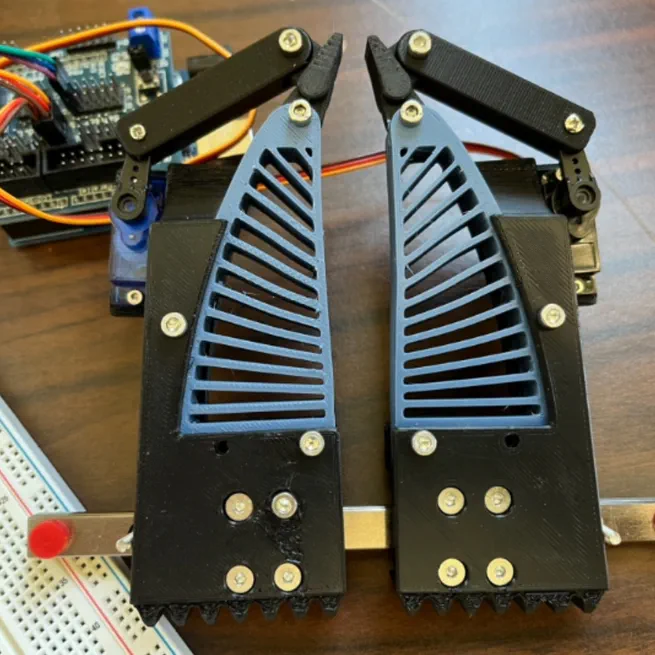
Soft Gripper with Rigid Finger Tips
Gripper for both power grasps and pinching.
May 10, 2024
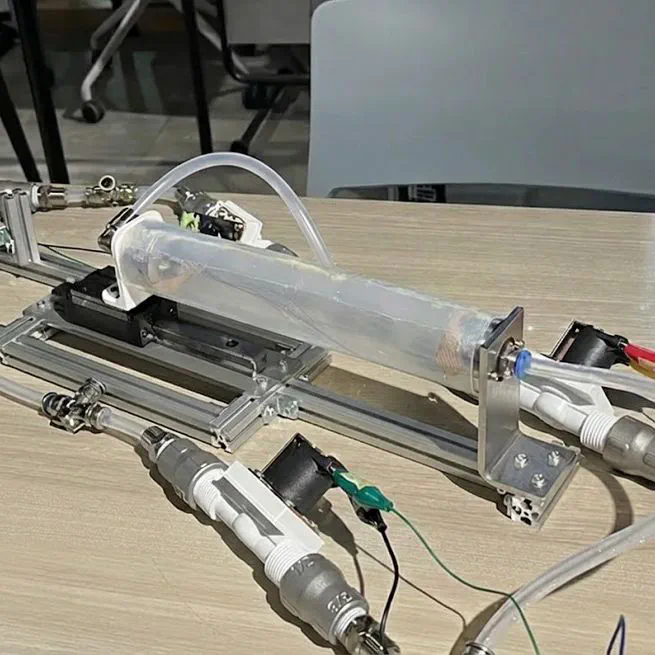
Shape Memory Alloy Actuator Test Bed
An SMA actuator controlled by temperature controlled water.
Oct 24, 2023